




The nest of the weaver ant is a marvel of cooperative engineering. On tree branches high in the canopy, worker ants form a living bridge that other ants use to cross after gathering leaves for the new nest. Meanwhile, a separate group of worker ants pluck larvae from an existing nest, each ant grasping a larva in its jaws. These workers then carry the larvae to the new nest site and position themselves along the edges. As each ant squeezes the larva within its mandibles, the larva extrudes a thin silk fiber thread. By moving and squeezing the larvae along the edges of the leaves, the ants meticulously weave the fine silk threads into a sticky mat which bonds the neatly formed leaf layers into a new nest.
As humans develop technologies that advance autonomous robotic manufacturing —especially additive manufacturing and assembly automation — we can take a page from this ingenious ant. And knowingly or not, researchers at the University of Arkansas appear to have done just that. In a paper published in The Rapid Prototyping Journal back in 2017 titled, “A Chunk-Based Slicer for Cooperative 3D Printing,” Jace McPherson and Wenchao Zhou introduced the concept of slicing computer-aided design (CAD) models into “chunks” that mobile printers — i.e. printhead-carrying mobile robots — can use to print cooperatively in swarms without interfering with each other. Zhou, along with Robert Austin Williams and Lucas Galvan Marques, formed the company AMBots in the spring of 2018 to advance this technology.
Featured Content



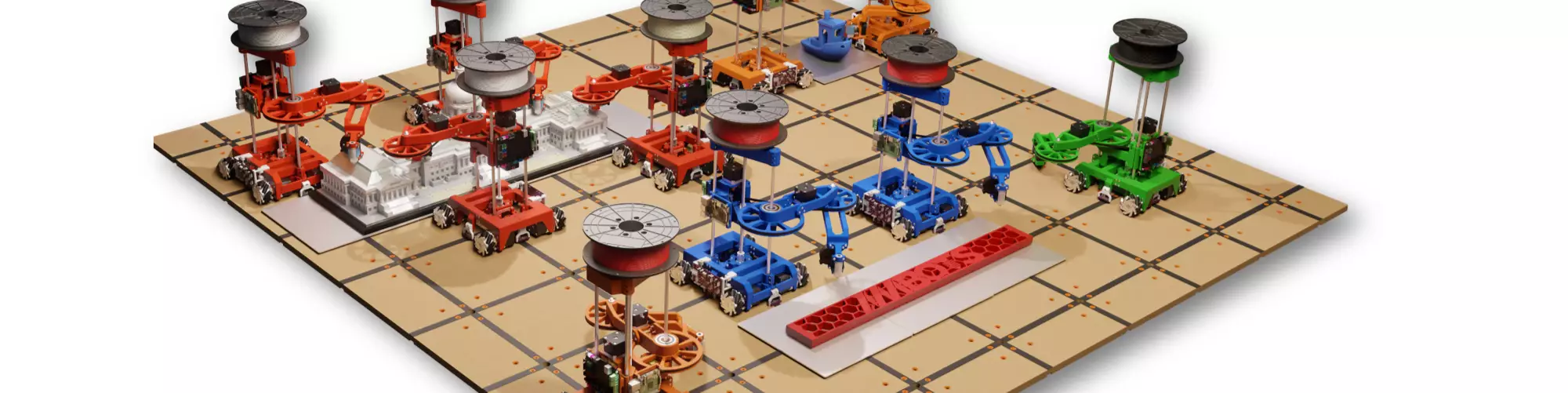
Much like the weaver ants, AMBots’ swarm of mobile robots work cooperatively to carry out a printing job simultaneously, thus providing scalability for print size and printing time. Each robot is assigned one chunk to print at a time via wirelessly transmitted code. The robots work along a wired, tiled platform, using batteries to move in any direction but drawing power from the grid while printing in stationary position. With the unlimited X-axis movement of the robots paired with the chunk-based model slicing algorithm, the potential dimension of a part is theoretically unlimited. McPherson and Zhou contend that this new, chunk-based approach to 3D printing also enables truly distributed manufacturing. The team also studied the mechanical strength of the chunk-based 3D-printed part and found no degradation of material properties and part strength compared to traditionally printed parts.
Much like weaver ants, AMBots’ swarm of mobile robots work cooperatively to carry out a build simultaneously, thus providing scalability for part size and #3Dprinting time. - via @AddMfgMedia https://ctt.ac/k5f0Z+
Capable of fused deposition modeling (FDM) printing across multiple materials, the robots themselves are 80% 3D printed and outfitted with SCARA-style arms and omnidirectional wheels, plus Bluetooth capabilities and laser motion sensors to guide movement. While mobile robotic printers like this have been researched before, AMBots is the first company to create an end-to-end solution for cooperative or swarm robotic 3D printing.
And it all starts with the CAD slicer.
Divide and Conquer
Zhou recently told me that the company’s research was motivated by what he considers to be the “impossible triangle” conundrum posed by 3D printing today. In this analogy, the three “impossible” angles that never quite meet are represented by print resolution, printing speed and cost. “If you want to achieve very high resolution,” he says, “the printing will be slow. If you want to print fast, the resolution may be low. If you want to print fast at high resolution, the cost will be high.”
The divide and conquer strategy employed by AMBots aims to join these currently impossible angles, beginning with the software’s slicing algorithm. Traditionally, CAD models for 3D printing are sliced into layers intersected at different planes along the Z-height. The chunking strategy for AMBots’ slicer is largely dependent on the geometry of the model, as well as the number of available robots and the tactics a programmer wants to employ for cooperative printing. For example, chunking a CAD model for two robots would involve splitting the model into multiple chunks along the Y or X direction, angling the chunks with sloped planes to increase bonding. The slicer then slices the chunks along the Z direction into layers and generates commands for printing and sequencing among the two robots. Inserted into the code are communication commands for the robots to orient themselves in space-time and work sequentially without running into each other or the printed part.
Zhou says that the sloped angles of the chunks are key to the increased strength of the bonds between the chunks themselves. Because of the high slope angles, the heated extruder nozzle reheats the previously printed layer and, in some cases because of the nozzle’s angle, lightly touches it. Zhou says that these factors result in a 3D printing method that requires no post-processing to assemble components and strong bonds between chunks. “We actually did some micro-3D scanning of the chunk bond structure and it turns out that because of these factors, the density of the chunk bond is higher than the rest of the part,” he says.
Zhou also says that because the slicing algorithm keeps the 3D printing process localized, it also solves warping and accuracy control issues that often arise when the size of the object increases. For example, a printed part measuring two meters in the X and Y directions would require extremely accurate Z positioning. The slightest angle changes over that distance would result in a large discrepancy by the time the print head reached the opposite end of the part. Printing only a small area at a time and keeping those processes local thus reduces the positioning requirements.
Just as importantly, Zhou says, this chunking process alleviates heat transfer issues, especially for large objects in which the temperature gradient from one end to another can be severe. When the extruder returns to print a hot layer on top of an already cooled layer at the opposite end, thermal stress forms within the part. “Thermal stress is a common issue in large-format 3D printing, which may lead to cracks in the printed part,” he says. “But we're keeping everything localized, so there's no fundamental difference between printing in our platform and printing with the small-scale 3D printer because it keeps everything localized.”
Zhou, Williams and co-founder Lucas Marques founded AMBots based on research in the Department of Mechanical Engineering at the University of Arkansas, where they’ve had more than 40 different students and faculty —a human swarm, if you will — participate in the different aspects of the research. With plans to eventually incorporate pick-and-place assembly and machining functions into the robots, the ultimate vision is to enable fully autonomous manufacturing. Initial interest and support by numerous companies in the construction, architecture and design industries ensures that, for now, these robots will carry forward their missions.







Related Content

Formlabs Part Removal Mechanism Enables Lights-Out Production
A build platform overcoming the need for manual part removal enables automated part handling, and therefore continuous production from one build cycle to the next.
Read More
10 Important Developments in Additive Manufacturing Seen at Formnext 2022 (Includes Video)
The leading trade show dedicated to the advance of industrial 3D printing returned to the scale and energy not seen since before the pandemic. More ceramics, fewer supports structures and finding opportunities in wavelengths — these are just some of the AM advances notable at the show this year.
Read More
DMG MORI: Build Plate “Pucks” Cut Postprocessing Time by 80%
For spinal implants and other small 3D printed parts made through laser powder bed fusion, separate clampable units resting within the build plate provide for easy transfer to a CNC lathe.
Read More
How AM Enables Cobot Automation for Thyssenkrupp Bilstein (Includes Video)
The shock absorber maker has responded to its staffing shortages through extensive use of collaborative robots. In-house 3D printing makes this possible by providing the related hardware needed to complete the cobot-automated cells.
Read MoreRead Next

3D Printing Brings Sustainability, Accessibility to Glass Manufacturing
Australian startup Maple Glass Printing has developed a process for extruding glass into artwork, lab implements and architectural elements. Along the way, the company has also found more efficient ways of recycling this material.
Read More
At General Atomics, Do Unmanned Aerial Systems Reveal the Future of Aircraft Manufacturing?
The maker of the Predator and SkyGuardian remote aircraft can implement additive manufacturing more rapidly and widely than the makers of other types of planes. The role of 3D printing in current and future UAS components hints at how far AM can go to save cost and time in aircraft production and design.
Read More
Hybrid Additive Manufacturing Machine Tools Continue to Make Gains (Includes Video)
The hybrid machine tool is an idea that continues to advance. Two important developments of recent years expand the possibilities for this platform.
Read More